I must be a glutton for punishment because I'm designing a quadcopter. I originally bought the Robo 3D Drone Kit thinking that I could actually print it on my printer. I mean, honestly, Fry's Electronics had the kit a foot away from the printer I bought in a kiosk. But of course, none of the designs inside actually work with the Robo C2, given the print bed size. So the kit's been sitting in the box for a year now.
Day 1
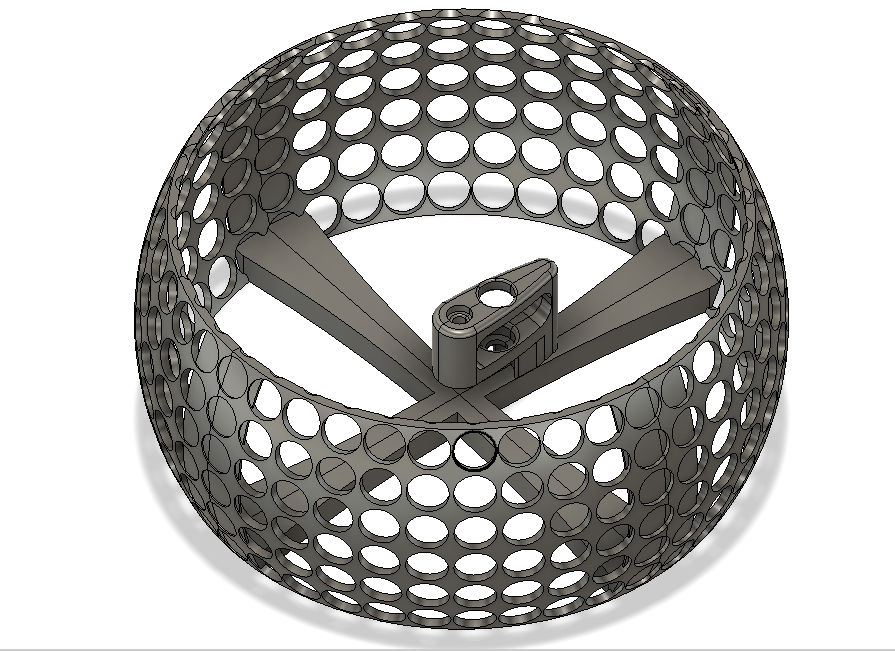
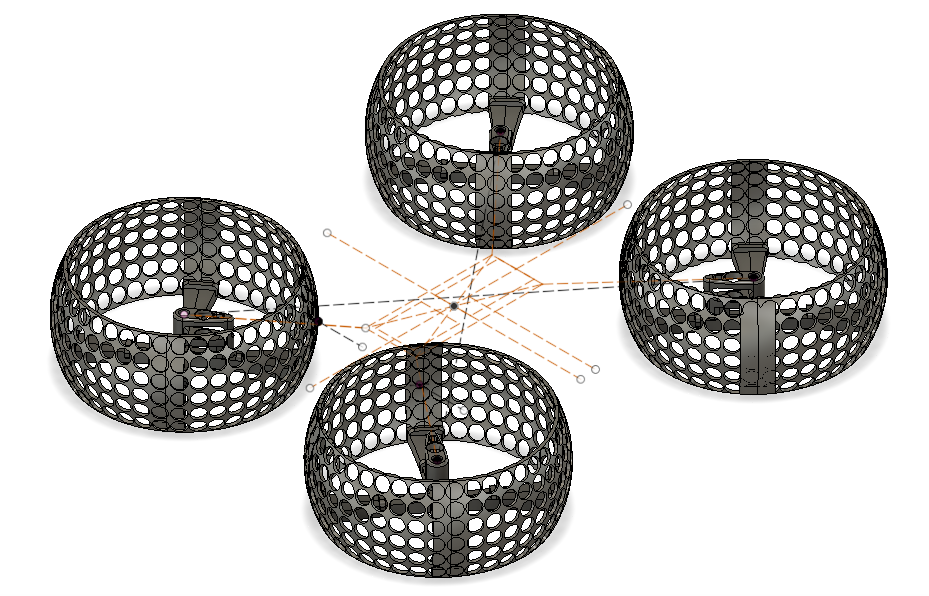
So in my quadcopter, each of the rotors will be safely enclosed inside a cage like the following I've designed. I have an idea of the overall copter weight requirement but nothing's concrete; of course there's no working model and none of the internally-created quadcopters there actually flew. It was more sales hyperbole than anything.
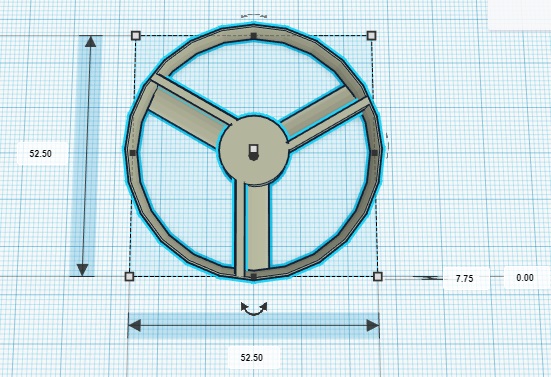
My attempts to print a scaled-down version have all failed so far since everything's so fragile to begin with. I'm now printing the fully-scaled prop arms and they're looking good.
I'm guessing that I'll glue the bigger parts together but I've designed in a hex head aluminum bolt to hold the prop arm assembly to the enclosure. Haven't quite gotten the main rig design yet since I'll need to measure some of the existing wiring from the kit first.
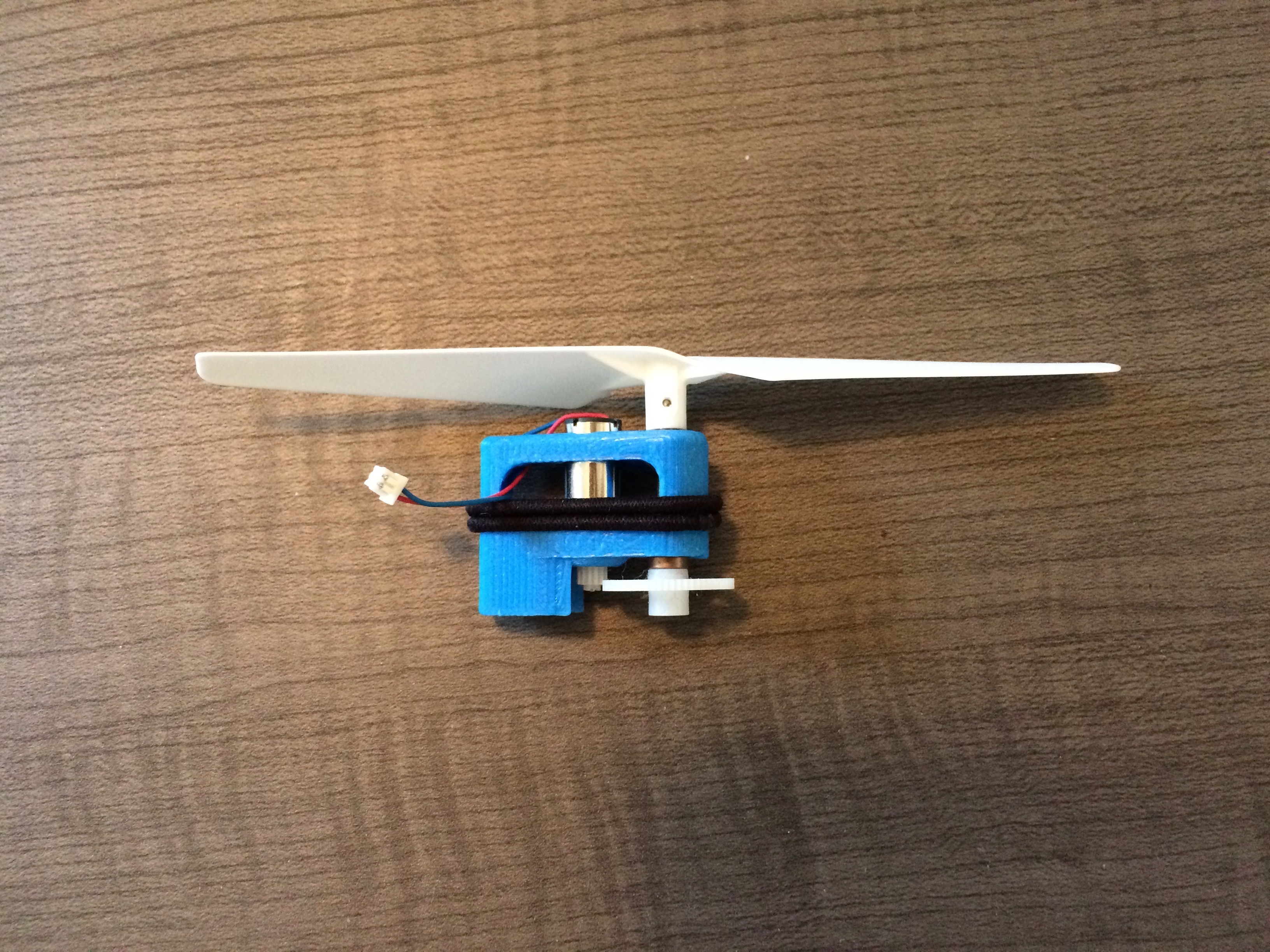
Well, when I said the prop arms work perfectly, I meant to say "I needed like five more revisions before the prop arms worked perfectly". ha Seriously, though, it's fussy trying to get the right amount of gear-to-gear tension, have the motor accepted without having to resort to heating anything and getting the bearings to fit without heat... as well as getting the cabling routed nicely.
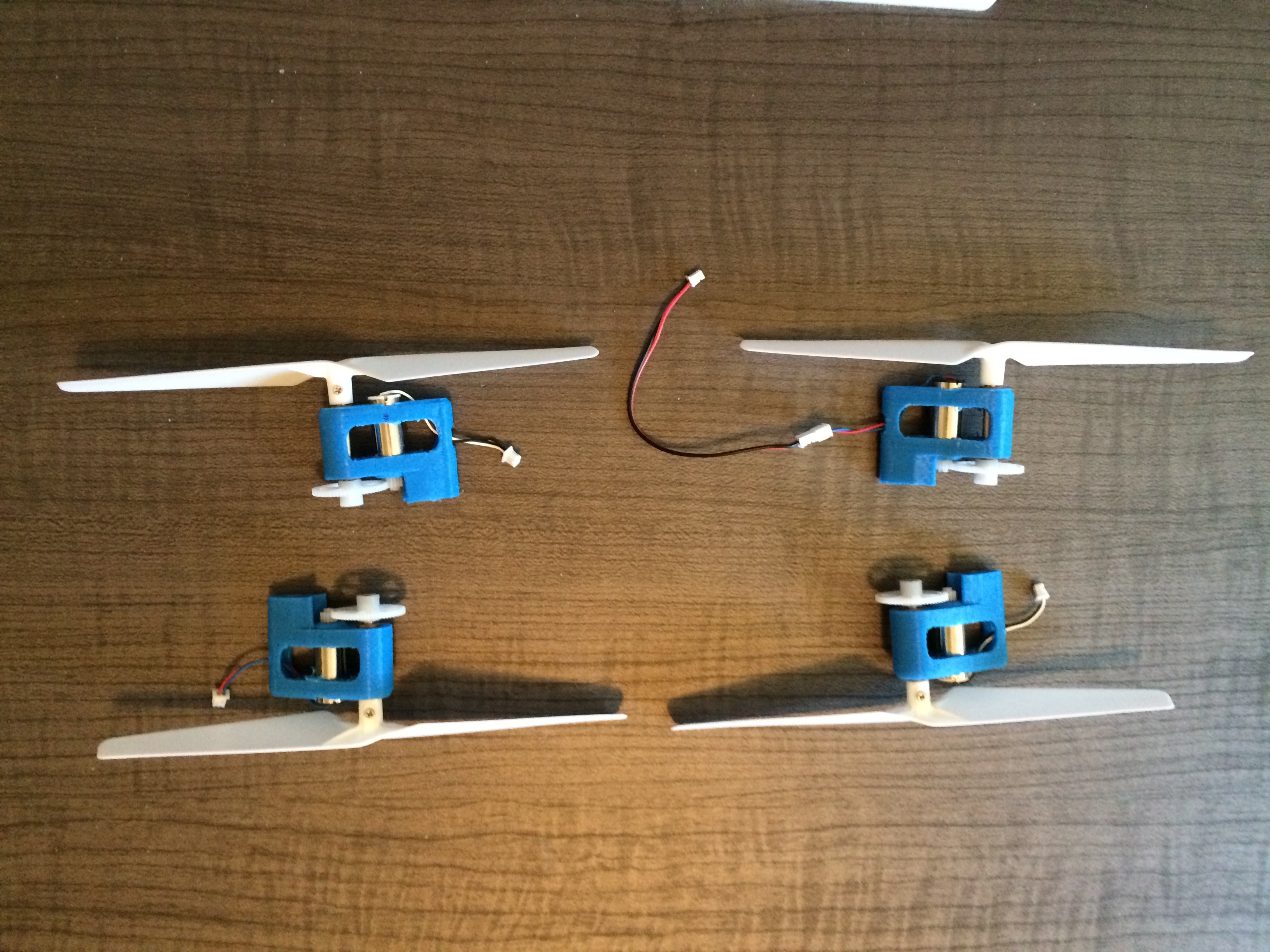
I've knocked things done to a single part rather than halves. What's interesting is that half of these are clockwise motors and the other half counter-clockwise.
hm as i look on the pictures of the drone on the robot page it looks like the probs should be direct driven.
You added a gear ratio on it so the probs are much slower than they have to be.
In addition the finished drone as they planed it should be much lighter than you final drone
Well, no. The Robo 3D—created designs have never worked and they actually have the same layout with the motor + gear arrangement that I have. The original wasn't direct.
In fact, the original designs never worked successfully. (I contracted with them and internally nobody was able to make one that flew. They ended up ditching the entire project and shipping the kits back to the manufacturer.)
I've only owned the mini and micro drones cuz I like to use them inside. The fact that two props go clockwise and the other two go counter is how all of mine worked, so that doesn't sound strange. But, none of them have used gears, they've all been direct drive
The larger gear being on the prop seems a little counter intuitive tho. You'll get more power, but fewer rpm's out of the prop that way. I would have thought that for a larger drone you'd want LOTS of rpm's
It's a work-in-progress. I'll need to test some things after I get the first enclosure printed. The way I'm doing it now, I could drop in a replace set of motors, to be honest.
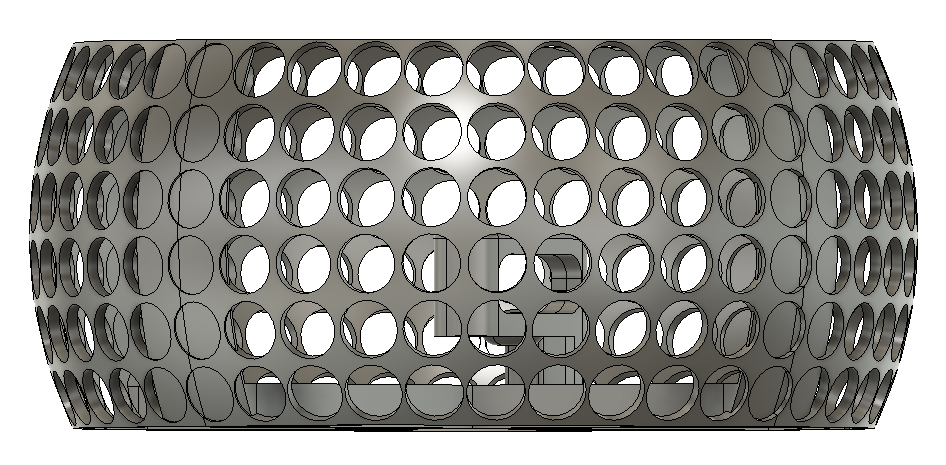
I finally got a quarter-panel printed that works out. It was necessary to turn off Cura's supports and to model my own in the CAD file. So now I have 15 more quarter-panels to print @ 3 hours each so this will take a bit.
I saw a video on PROpellers vs IMpellers and I'm working on these for my DX-2
They're a little bulkier, but, they've also got 3 blades VS only 2, and I'm hoping that the action of the impeller might offset the weight. Plus, it's got built in blade protection
I'm calling this one left, the other ones go the other way
You might want to increase the vertical outside edge of that "protection ring", also known as a shrouded or ducted (fan). It will result in greater lift.
 So the kit's been sitting in the box for a year now.
So the kit's been sitting in the box for a year now.