What is the problem?
I recently installed octopi on my raspberry pi 3 B and, despite reviews I've come across, it was installed and working with little to no problem. I have a QIDI X-ONE-2 that I print on often, but I needed I wanted a remote solution so I can check/monitor prints on the go. However Whenever I try to start a print remotely (from the UI) the initial print sequence seems to go extremely slow and sporadic.
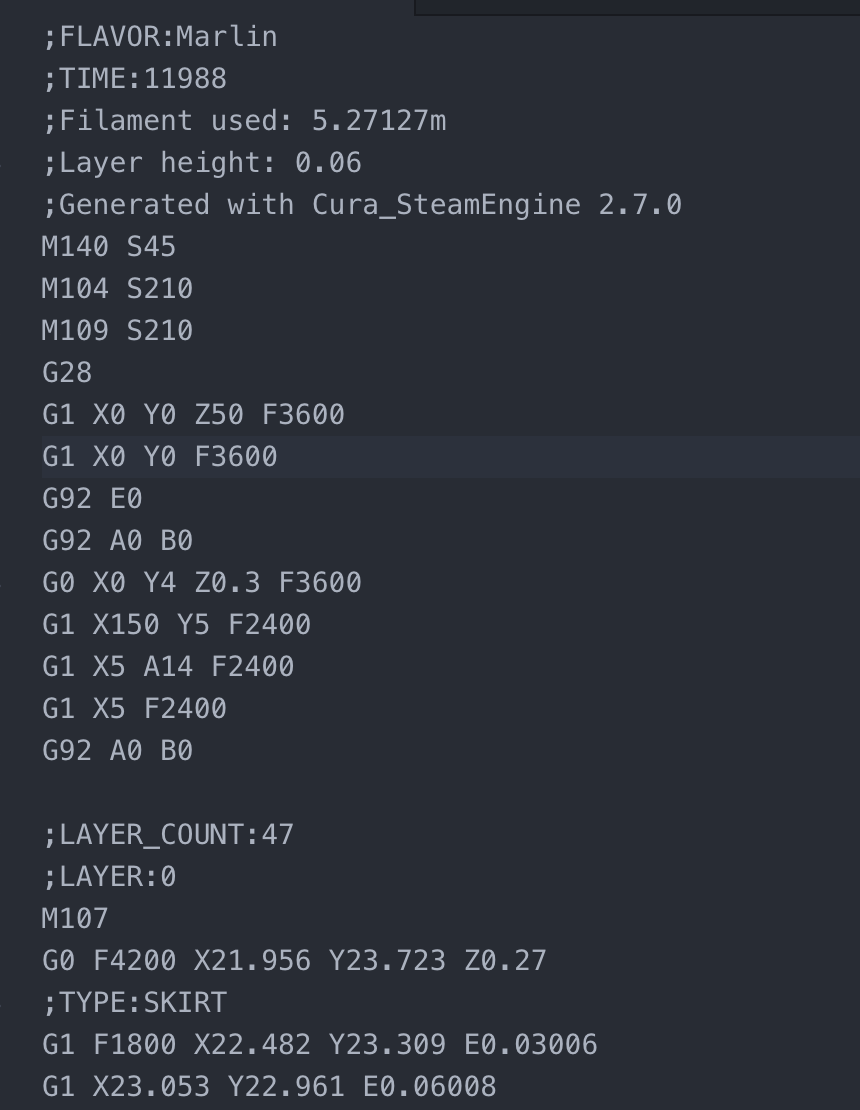
Usually when I start a print the manual way my test bed and extruder heat up, then the extruder moves to the top right corner of the test bed (beeps when hitting a bumper switch), then back to the bottom left corner of the test bed (beeps when hitting a bumper switch), and then the test bed rises to the extruder tip (beeps when hitting a bumper switch). I've seen this same sequence 100's of times, and it has never had an issue...
But when I try to start a print using the Octoprint UI with the Upload option (Upload to SD doesn't work for some reason), it loads the gcode with no problem, heats up the bed and the extruder to the correct temps (I double checked), but does this strange crawl with the extruder to the top right of the bed but never makes it, and then it starts doing a strange curve anti clockwise a bit... then jumps directly into the print with its normal speed while the print bed was never lifted to the correct position so filament just squeezes out of the extruder hanging in the air while moving to it's expected coordinates but printing in the air!
What did you already try to solve it?
1.) I tried this a few different times, only to see the same response.
2.) I tried manually moving the extruder around and everything seemed to be fine except for the Z axis moving in the reverse direction, but I went into the settings and corrected this. After that the controls worked fine.
3.) I tried printing that same file using the manual method (literally touching the printer screen), and it printed fine so I know it's definitely related to my setup.
Additional information about your setup (OctoPrint version, OctoPi version, printer, firmware, octoprint.log, serial.log or output on terminal tab, ...)
Octoprint Version : 1.3.9
Printer : Qidi Tech X-ONE2 (Chinese Manufacturer - not sure if that effects coordinate translations)
Raspberry Pi 3 B
32GB Ultra San Disk (SD Card for raspberry pi)